Intelligent Traffic Monitoring System Using Vehicular Ad Hoc Network
Article Sidebar
Main Article Content
Abstract
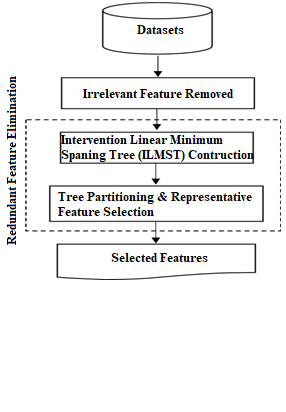
The growing significance of road safety and human engagement in transport has emerged as a matter of national concern, exerting a profound impact on the lives of individuals.. Many road accidents and crashes failed to ensure human life safety. As a result, the traffic management system must maintain the balance in accordance with the maximum road limits. Vehicles with sensors and automated self-driving capabilities are now available, such as Tesla and others. The proposed system is based on a technique known as Intervention linear minimum spanning tree (ILMST), which employs a topology with lengths that are proportionally equal. When using dynamic topology, there is packet loss during a change of location or a continuous update in networking via vehicle movement from one location to another. In this manner, each node computes the weighted nodes with a number of partitions in order to provide a linear time update. This reduces the number of connected edges in the graph that are repeated. When the size of the repeated graphs that relate the GPS route from the maps is reduced, traffic updates avoid recursion and provide the best routes for customers. Traffic congestion overhead can be reduced by implementing the proposed methodology. It is possible to avoid it where there are traffic signals and all other sensor-based wireless devices in a vehicular Ad Hoc Network (VANET). The safety measures are also a necessary step based on the communications in routing and other protocols. The system, when combined with a neural network-based positioning system (NNPS) with various perceptrons, can maintain vehicle speed and categorize safety threats such as group classification. A solution can be found by repairing the DDoS attack based on the results of the various aspects that provide output for malicious monitoring.